机械人焊接工装夹具的适用范围
1.焊接机器人适用于产量大的产品,如果产量小并且产品种类又偏多,使用焊接机器人就不太合适,因为给所有的工件编辑示教程序的确是一项很费时费力的工作。
2.在焊接薄板(通常指板厚小于3mm的板)时,这样的工件对下料和装配精度要求比较高,而且必须保证工件的一致性较好。焊缝位置基本无间隙,或很小间隙(通常要求间隙不超过所用焊丝的半径)。
在焊接中厚板(通常指板厚在3mm以上)时,这些工件的下料及装配精度往往不是特别高,机器人焊接时需要使用到传感器来补偿工件本身的偏差或安装位置的偏差。

机械人焊接工装夹具与普通焊接夹具的区别:
1.对零件的定位精度要求更高,焊缝相对位置精度较高。
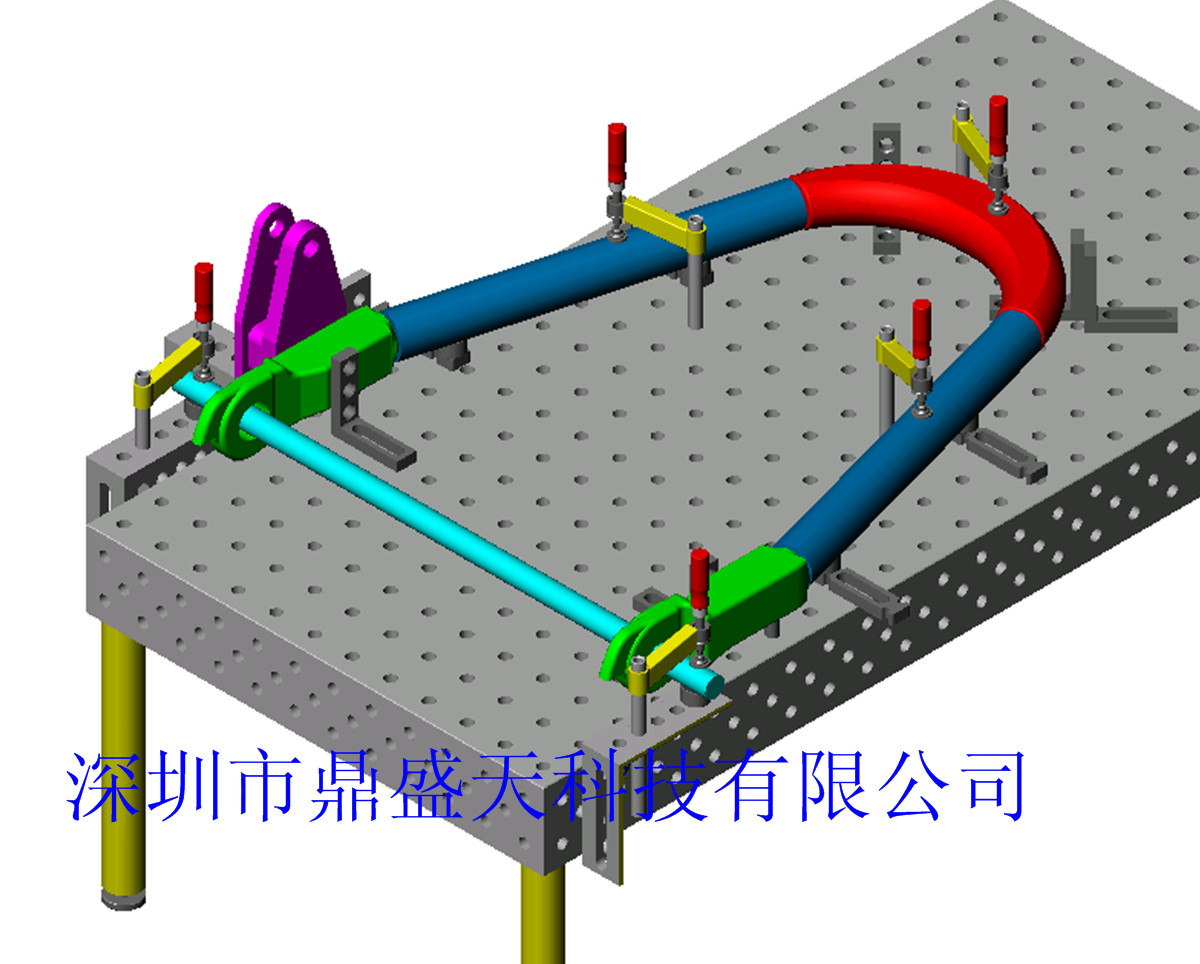
2.由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接工装夹具上是按顺序进行的,因此,它们的定位和夹紧是一个个单独进行的。
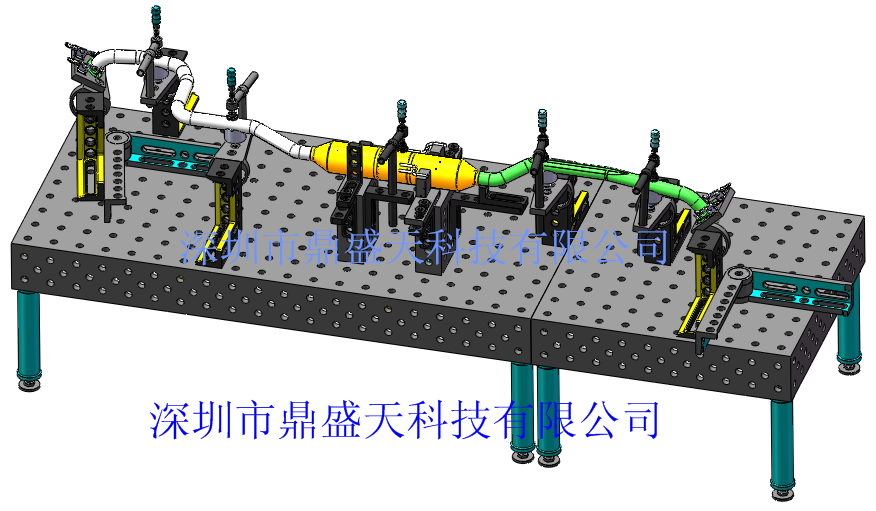
3.机器人焊接工装夹具前后工序的定位须一致。
4.由于变位机的变位角度较大,机器人焊接工装夹具尽量避免使用活动手动插销。
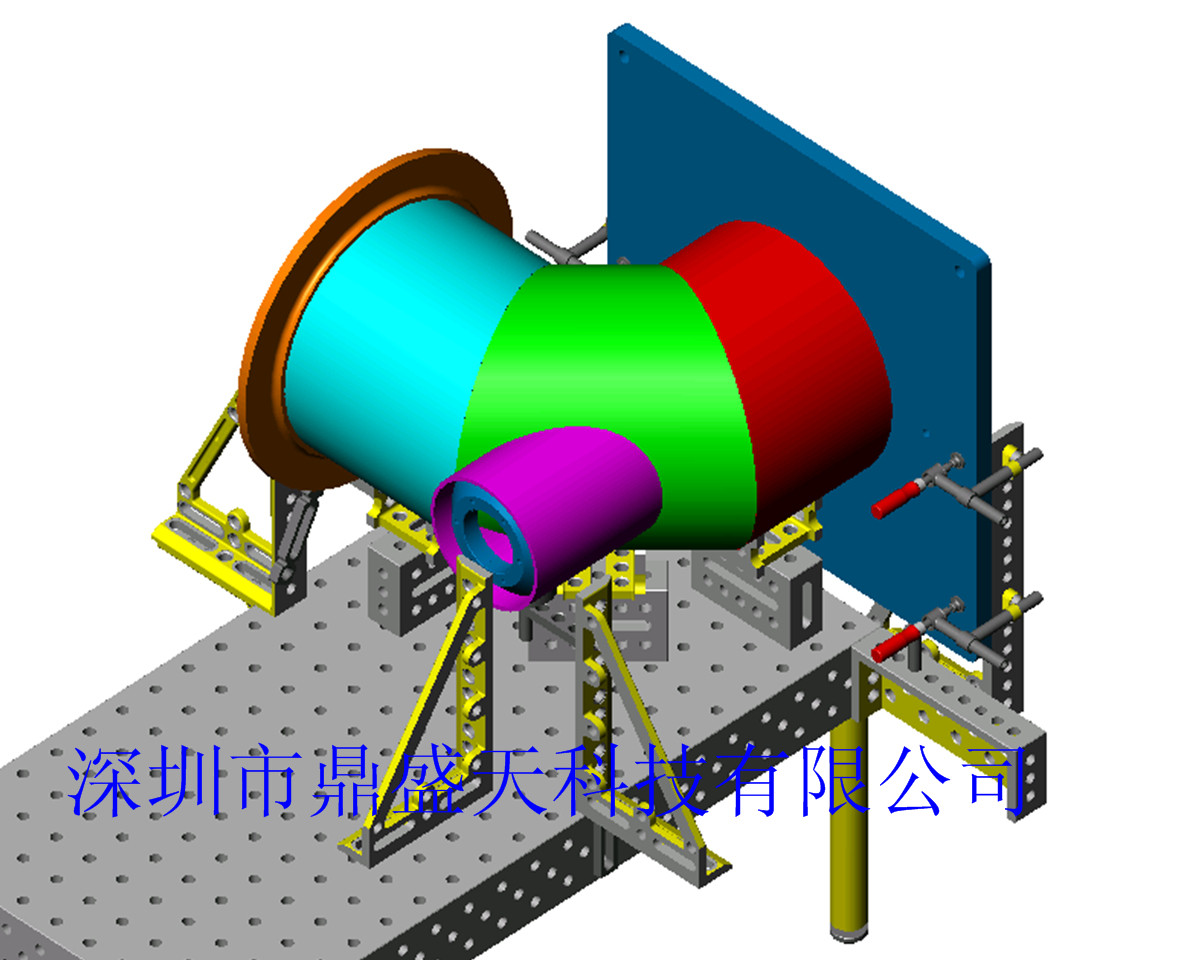
5.机器人焊接工装夹具应尽量采用快速压紧件,基础工作台配置孔系平台。以便将压紧快速装夹压紧。
6.与普通焊接夹具不同,机器人焊接工装夹具除正面可以施焊外,其侧面也能够对工件进行焊接,可以无限延伸。
以上六点是机器人焊接工装夹具与普通焊接夹具的主要不同之处,设计机器人焊接工装夹具时要充分考虑这些区别,使设计出来的夹具,能满足使用要求。


深圳市YP官网科技DCT品牌焊接工装专注专业大型吊臂、塔吊、桁架等的焊...
选择一家适合的焊接工装夹具厂家(深圳YP官网科技)可以让您的焊接 工...
DCT品牌焊接工装15年的焊接工装夹具案例积累,15年的品牌沉淀,用心做好...
深圳市YP官网科技DCT品牌三维柔性焊接工装夹具是您完成各种异型管道焊...
深圳YP官网15年老品牌焊接工装夹具厂家话你知三维柔性焊接工装夹具的...
留下您的称呼以及联系方式YP官网·(中国)集团将会给您发送最新消息!


